오늘은 일상에서 흔히 볼수있는 보행자 신호등을 Verilog HDL로 구현해보도록 하겠습니다.
신호등은 다음 네 가지 주요 상태를 갖습니다: 노란색, 빨간색, 초록색, 그리고 보행자 신호 상태입니다.
- 노란색(YELLOW) 상태는 신호 변경을 알리는 경고 신호로 잠시 지속됩니다.
- 빨간색(RED) 상태에서는 사람이 건널 수 없고 차량이 도로를 자유롭게 진행할 수 있습니다.
- 초록색(GREEN) 상태는 차량에 정지를 명령하고, 보행자가 도로를 건널 수 있도록 합니다.
- 보행자(PED) 신호 상태는 보행자가 버튼을 누를 때 활성화되어, 안전하게 길을 건널 수 있도록 초록색 신호를 제공합니다.
위 조건을 가지고 보행자 신호등을 구현해보도록 하겠습니다.
Verilog HDL Traffic Module & Testbench
더보기
Traffic module
`timescale 1ns / 1ps
module my_traffic(
input RST,
input CLK,
input PED_CROSS,
output reg RED,
output reg YELLOW,
output reg GREEN,
output reg WORK
);
parameter CLK_FREQ = 125_000_000;
localparam [1:0] //sIDLE = 3'd0,
sYEL = 2'd0,
sRED = 2'd1,
sGREEN = 2'd2,
sPED = 2'd3;
reg [1:0] curr_state, next_state;
reg start_cnt;
wire cnt_done;
reg [6:0] time_slot;
wire [6:0] curr_slot;
reg [6:0] curr_time;
reg pd_cross_1d, pd_cross_2d;
wire pd_rising;
always @(posedge CLK)
begin
if (RST)
curr_state <= sYEL;
else
curr_state <= next_state;
end
always @(RST, curr_state, cnt_done, pd_rising)
begin
if(RST) begin
next_state = sYEL;
start_cnt = 1'b0;
time_slot = 1'b0;
RED = 1'b0;
GREEN = 1'b0;
YELLOW = 1'b0;
WORK = 1'b0;
end else begin
RED = 1'b0;
GREEN = 1'b0;
YELLOW = 1'b0;
WORK = 1'b0;
case (curr_state)
sYEL : begin
time_slot = 10;
if(cnt_done) begin
next_state = sRED;
start_cnt = 1'b0;
end else begin
next_state = sYEL;
start_cnt = 1'b1;
end
YELLOW = 1'b1;
end
sRED : begin
time_slot = 7'd80;
if(cnt_done) begin
start_cnt = 1'b0;
next_state = sGREEN;
end else if(pd_rising) begin
next_state = sPED;
start_cnt = 1'b0;
end else begin
start_cnt = 1'b1;
next_state = sRED;
end
RED = 1'b1;
end
sGREEN : begin
time_slot = 80;
if(cnt_done) begin
start_cnt = 1'b0;
next_state = sYEL;
end else begin
start_cnt = 1'b1;
next_state = sGREEN;
end
GREEN = 1'b1;
WORK = 1'b1;
end
sPED : begin
if(curr_time < 20) begin
time_slot = 20;
end else begin
time_slot = 12;
end
if(cnt_done) begin
start_cnt = 1'b0;
next_state = sGREEN;
end else begin
start_cnt = 1'b1;
next_state = sPED;
end
RED = 1'b1;
end
default: next_state = sYEL;
endcase
end
end
my_time #(.CLK_FREQ(CLK_FREQ))
u0 (
.RST (RST),
.CLK (CLK),
.time_slot (time_slot),
.start (start_cnt),
.curr_slot (curr_slot),
.cnt_done (cnt_done)
);
always @(posedge CLK)
begin
pd_cross_1d <= PED_CROSS;
pd_cross_2d <= pd_cross_1d;
end
assign pd_rising = pd_cross_1d & ~pd_cross_2d;
always @(posedge CLK)
begin
if(curr_state == sYEL)
curr_time <= 7'd0;
else if(pd_rising)
curr_time <= curr_slot;
end
endmodule
my_time module
`timescale 1ns / 1ps
module my_time(
input RST,
input CLK,
input [6:0] time_slot,
input start,
output [6:0] curr_slot,
output cnt_done
);
parameter CLK_FREQ = 125_000_000;
wire [39:0] MAX_CNT = time_slot * CLK_FREQ / 10;
reg [29:0] cnt;
always @(posedge CLK)
begin
if (RST)
cnt <= 30'd0;
else if (start)
cnt <= cnt + 1;
else
cnt <= 30'd0;
end
assign cnt_done = (cnt == MAX_CNT -1);
assign curr_slot = (cnt/CLK_FREQ) * 10;
endmodule
Testbench
`timescale 1ns / 1ps
module my_traffic_tb();
parameter CLK_PD = 10.0;
reg RST, CLK, PED_CROSS;
wire RED, GREEN, YELLOW, WORK;
my_traffic #(.CLK_FREQ(100))
uut (
.RST(RST),
.CLK(CLK),
.PED_CROSS(PED_CROSS),
.RED(RED),
.YELLOW(YELLOW),
.GREEN(GREEN),
.WORK(WORK)
);
initial begin
RST = 1'b1;
#(CLK_PD*20);
RST = 1'b0;
end
initial CLK = 1'b0;
always #(CLK_PD/2) CLK = ~CLK;
always begin
PED_CROSS = 1'b0;
wait (RST == 1'b0);
wait (RED == 1'b1);
wait (RED == 1'b0);
wait (RED == 1'b1);
#(CLK_PD*12)
PED_CROSS = 1'b1;
#(CLK_PD*3);
PED_CROSS = 1'b0;
wait (GREEN == 1'b1);
wait (GREEN == 1'b0);
wait (YELLOW == 1'b1);
wait (YELLOW == 1'b0);
$finish;
end
endmodule1
신호등 시스템을 제어하는 FSM (유한 상태 기계)을 구현한 my_traffic 모듈입니다. 이 모듈은 입력 신호로 리셋(RST), 클록(CLK), 그리고 보행자 횡단 버튼(PED_CROSS)을 받으며, 출력으로는 각 신호등의 상태 (RED, YELLOW, GREEN)와 작업 신호(WORK)를 제어합니다.
시스템은 보행자의 요청에 반응하여 신호를 적절히 조절하며, 각 상태는 설정된 시간(time_slot) 동안 유지됩니다. 이 시간은 외부 모듈(my_time)에 의해 관리되며, 시간이 완료되면 다음 상태로 자동으로 전환됩니다.
모듈의 주요 동작
기본 신호 주기
- 노란색(YELLOW): 경고 신호로, 다음 신호로의 전환을 준비합니다. 지속 시간은 짧습니다.
- 빨간색(RED): 차량이 진행할 수 있도록 허용합니다.
- 초록색(GREEN): 차량 정지를 명령하며, 보행자가 길을 건널 수 있는 기회를 제공합니다.
보행자 신호 요청 (PED):
- 보행자가 횡단 버튼을 누르면, 초록색 신호로 전환하여 보행자가 길을 건널 수 있게 합니다. 보행자 신호는 특정 시간 동안 활성화됩니다.
신호 전환 로직
- 각 신호 상태는 특정 시간(time_slot) 동안 유지됩니다. 이 시간은 my_time 모듈을 통해 관리되며, 시간이 완료되면(cnt_done) 다음 상태로 전환됩니다.
- 보행자 버튼이 활성화되면 (상승 에지 감지), 신호등은 빨간색 상태로 전환하여 보행자가 도로를 건널 수 있도록 합니다. 이때의 시간 동안 보행자 신호가 지속됩니다.
상태 기반 제어
- YELLOW 상태에서는 노란색 신호만 활성화됩니다.
- RED 상태에서는 초록색 신호와 작업(WORK) 신호가 활성화되어 차량이 통행할 수 있습니다. 보행자 버튼 입력에 반응하여 보행자 신호(PED)로 이동할 수 있습니다.
- GREEN 상태에서는 초록색 신호만 활성화되고, 보행자가 길을 건널 수 있습니다.
- PED 상태에서는 2초 후에 초록색 신호가 활성화되며, 보행자 신호가 주어진 시간 동안 지속됩니다. 시간이 완료되면 다시 차량 통행을 위한 빨간색 신호로 전환됩니다.
Testbench
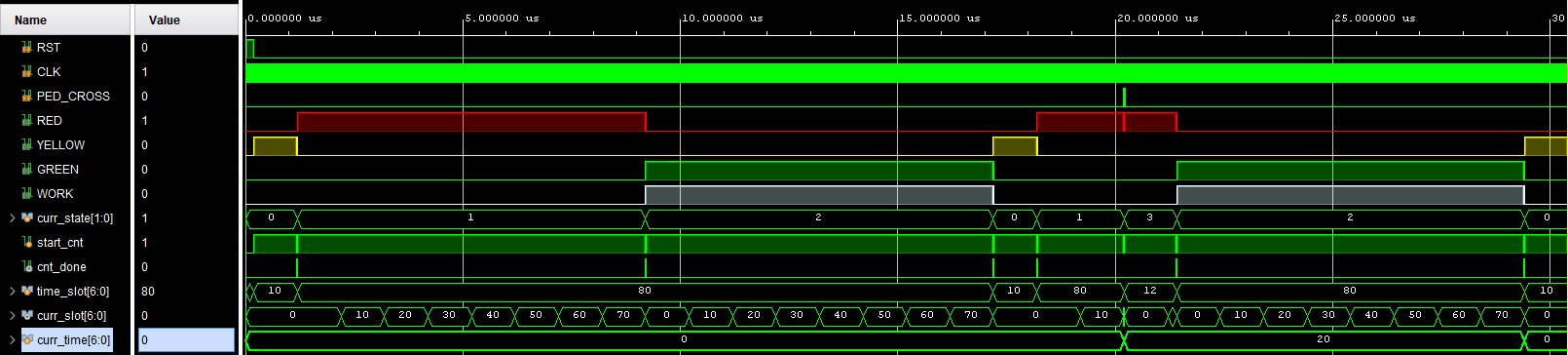

이 시스템은 도로 교통을 효율적으로 관리하고, 보행자와 운전자의 안전을 보장하기 위해 설계되었습니다. 각 신호의 전환은 교통 흐름과 보행자의 필요에 따라 조정되어, 도로 사용자들에게 명확하고 일관된 지침을 제공합니다.
'하만 세미콘 아카데미 > Verilog HDL' 카테고리의 다른 글
| UART 이론 (수업시간 내용 정리) (0) | 2024.05.31 |
|---|---|
| Verilog HDL 실습 (Stop_Watch) (1) | 2024.05.31 |
| Verilog HDL 실습 (Security) (0) | 2024.05.31 |
| Verilog HDL 실습 (FSM) (2) | 2024.05.31 |
| Verilog HDL 실습 (Counter) (1) | 2024.05.31 |



